In this SEO-friendly YouTube video article, we will explore the Four Main Types of Robotic Arm Geometry in relation to Industrial Robotic Equipment. Understanding the different types of robotic arm geometry is essential for engineers and professionals working in the field of industrial automation. So, let’s dive in and explore these four main types in detail.
1. Cartesian Geometry:
Cartesian geometry, also known as rectilinear or gantry geometry, is one of the most common types of robotic arm geometry. It consists of three perpendicular linear axes, resembling the X, Y, and Z axes of a Cartesian coordinate system. This type of robotic arm is known for its ability to move in a straight line, making it ideal for applications that require precise positioning.
2. Cylindrical Geometry:
Cylindrical geometry features a rotary base with a linear arm extending from it. This type of robotic arm is characterized by its ability to rotate around a fixed axis and extend or retract its arm. Cylindrical geometry is commonly used in applications that require a combination of rotational and linear movements, such as welding and material handling.
3. Spherical Geometry:
Spherical geometry, also known as polar geometry, consists of a base with two rotary axes and a spherical wrist at the end. This type of robotic arm offers a wide range of motion and is particularly useful for applications that require high flexibility and dexterity, such as assembly and inspection tasks.
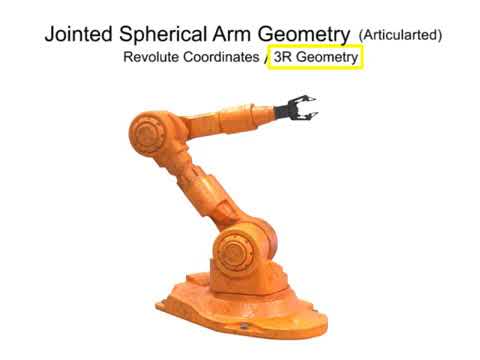
4. Articulated Geometry:
Articulated geometry is perhaps the most versatile and widely used type of robotic arm geometry. It consists of a series of interconnected rotary joints, resembling a human arm. This type of robotic arm can mimic human-like movements and is capable of performing complex tasks with precision. Articulated geometry is commonly found in applications such as painting, pick and place operations, and surgery.
Industrial Robotic Equipment plays a crucial role in various industries, including manufacturing, automotive, healthcare, and logistics. These robust machines are designed to improve efficiency, productivity, and safety in industrial processes. By employing the appropriate type of robotic arm geometry, companies can optimize their operations and achieve higher levels of automation.
In conclusion, understanding the Four Main Types of Robotic Arm Geometry is essential for professionals working with Industrial Robotic Equipment. Whether it’s Cartesian, Cylindrical, Spherical, or Articulated geometry, each type offers unique advantages and is suitable for specific applications. By choosing the right robotic arm geometry, companies can enhance their productivity and achieve their automation goals.
Check the coil packing solution with leading manufacturers for professional solutions in industrial automation. They offer a wide range of options tailored to your specific needs and requirements. Industrial Robot
“Exploring the Fundamental Robotic Arm Geometries: Understanding Engineering Basics and Industrial Equipment”
Related posts:
 “Choosing the Best Automation Solution: PLC vs. PC for Industrial Applications”
“Choosing the Best Automation Solution: PLC vs. PC for Industrial Applications”
 “Revolutionary Painting Arm: Unparalleled Precision and Efficiency for Industrial Automation”
“Revolutionary Painting Arm: Unparalleled Precision and Efficiency for Industrial Automation”
 “Revolutionize Manufacturing Efficiency with Budget-Friendly Collaborative Robot Arm”
“Revolutionize Manufacturing Efficiency with Budget-Friendly Collaborative Robot Arm”
 “Enhance Your Workstation with High-Performing Desktop Robotic Arms: Top 5 Industrial Robots for Sale”
“Enhance Your Workstation with High-Performing Desktop Robotic Arms: Top 5 Industrial Robots for Sale”
 “Revolutionizing Grocery Stores: Unveiling the Optimal Robot Workforce for Efficient Operations”
“Revolutionizing Grocery Stores: Unveiling the Optimal Robot Workforce for Efficient Operations”
 “Unveiling Revolutionary Industrial Robots: Cutting-Edge Innovations at ATX West 2020”
“Unveiling Revolutionary Industrial Robots: Cutting-Edge Innovations at ATX West 2020”
 “The Fascinating Creation Process of an Industrial Robot: Unveiling the Manufacturing Secrets”
“The Fascinating Creation Process of an Industrial Robot: Unveiling the Manufacturing Secrets”
 “Revolutionary Humanoid and Manipulator Robots Pushing Boundaries in Robotic Manufacturing”
“Revolutionary Humanoid and Manipulator Robots Pushing Boundaries in Robotic Manufacturing”
 The Intricacies of Robotic Manufacturing: Unveiling the Inner Workings and Significance
The Intricacies of Robotic Manufacturing: Unveiling the Inner Workings and Significance