Check out the leading manufacturers for professional coil packing solutions here:
Robotic arms have become an indispensable part of industrial automation systems. They play a crucial role in performing various tasks with precision and efficiency. In this YouTube video, we will delve into the different types of robot arm configurations in robotics, along with their advantages. By understanding these configurations, you can make informed decisions about which type of robot arm is best suited for your specific industrial needs.
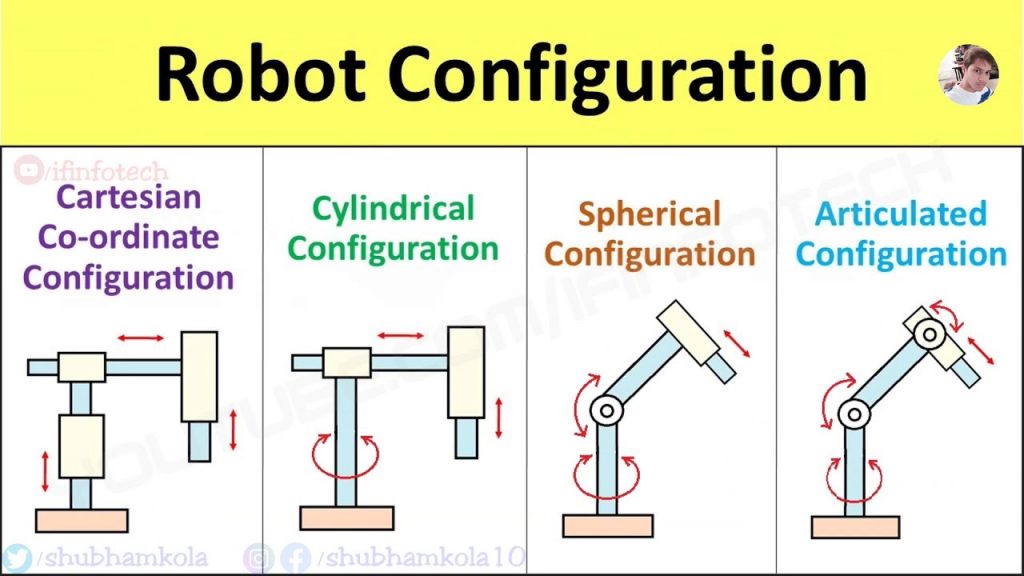
1. Cartesian Coordinate Configuration:
The Cartesian coordinate configuration is based on a three-axis system, where the robot arm moves in a straight line along each axis. This type of configuration is ideal for applications that require precise and linear movement, such as pick and place operations or assembly line tasks. The advantages of a Cartesian robot arm include its ability to handle heavy payloads and its straightforward programming.
2. Cylindrical Configuration:
A robot arm with a cylindrical configuration consists of a rotating base and a linear arm. This type of configuration enables the arm to move in a circular motion around a fixed point. Cylindrical robot arms are commonly used for tasks that involve handling objects in a cylindrical workspace, such as arc welding or painting. Their advantages include a compact design and the ability to reach objects at various angles.
3. Articulated Configuration:
Articulated robot arms mimic the movement of a human arm. They consist of a series of interconnected joints, allowing for a wide range of motion. This type of configuration is highly flexible and versatile, making it suitable for applications that require complex movements, like material handling or machine tending. The advantages of articulated robot arms include their dexterity and adaptability to different workspaces.
4. Spherical Configuration:
Spherical robot arms, also known as polar or spherical-coordinate robots, are designed to move in a spherical workspace. They have a rotating base, a shoulder joint, an elbow joint, and a wrist joint, enabling them to reach any point within their range. Spherical robot arms are often used in applications such as spot welding or assembly tasks. Their advantages include the ability to access hard-to-reach areas and perform tasks with high precision.
5. SCARA Configuration:
SCARA stands for Selective Compliance Assembly Robot Arm. This configuration consists of two parallel rotary joints and one linear joint. SCARA robot arms are commonly used for tasks that involve assembly or material handling in a horizontal plane, such as packaging or sorting. The advantages of SCARA robot arms include their speed and accuracy in repetitive tasks.
In conclusion, understanding the different types of robot arm configurations in robotics is essential for selecting the most suitable option for your industrial needs. Whether you require precise linear movements, circular motions, complex maneuvers, spherical workspaces, or horizontal plane operations, there is a robot arm configuration that can meet your requirements.
Check out the leading manufacturers for professional coil packing solutions here: Industrial Robot
Exploring Different Types of Robot Configuration: Cartesian Coordinate, Cylindrical, Articulated, Spherical, SCARA, and Industrial Robot Systems
Related posts:
 The Art of Robot Creation: Unveiling the Intricate Process of Robotic Manufacturing
The Art of Robot Creation: Unveiling the Intricate Process of Robotic Manufacturing
 “Revolutionary Applications Unveiled: Industrial Robots Redefine Manufacturing Landscape”
“Revolutionary Applications Unveiled: Industrial Robots Redefine Manufacturing Landscape”
 “Revolutionizing Industries: Unveiling the Power of Automation”
“Revolutionizing Industries: Unveiling the Power of Automation”
 “Revolutionary AI Humanoid & Industrial Robots: Unveiling Cutting-Edge Technological Marvels”
“Revolutionary AI Humanoid & Industrial Robots: Unveiling Cutting-Edge Technological Marvels”
 “The Rise of Automation in Chinese Manufacturing: How Robots Are Revolutionizing Factories”
“The Rise of Automation in Chinese Manufacturing: How Robots Are Revolutionizing Factories”
 “Revolutionary Industrial Robotic Arm: Unleashing Next-Level Efficiency and Precision”
“Revolutionary Industrial Robotic Arm: Unleashing Next-Level Efficiency and Precision”
 “Unleashing Automation Potential: Exploring PLCs for Industrial Efficiency and Streamlined Operations”
“Unleashing Automation Potential: Exploring PLCs for Industrial Efficiency and Streamlined Operations”
 “Experience the Future: A Virtual Journey Inside an Advanced Robotic Manufacturing Facility”
“Experience the Future: A Virtual Journey Inside an Advanced Robotic Manufacturing Facility”
 Revolutionary Advancements in Chinese Industrial Robotics: A Comprehensive Overview
Revolutionary Advancements in Chinese Industrial Robotics: A Comprehensive Overview